
The AI Technology Page:
Harvard, Google Unveil AI-Powered Virtual Rat for Brain Studies
Harvard scientists developed a virtual rat model with an AI brain to study how brains
control the movement of real rats. This innovative model accurately simulates neural
activity observed in real rats, leading to similar behaviours.
Collaborating with Google's DeepMind AI lab, Harvard University researchers aim to
understand better how brains control movement.
Advancements in Virtual Neuroscience
Partnering with Google's DeepMind AI lab, Harvard University researchers have
developed a virtual rat model featuring an artificial brain capable of replicating natural
movements. This model aims to enhance understanding of how brains regulate
movement.
Despite significant progress in robotics, Interesting Engineering reported that mimicking
the fluidity of animal and human motion remains a challenge. Diego Aldarondo, a
Harvard graduate students involved in the project highlighted hurdles in both hardware
and software.
Aldarondo elaborated that challenges exist in both hardware and software domains. On
the hardware side, researchers struggled to replicate animal bodies' flexibility,
robustness, and energy efficiency in robots.
On the other hand, software hurdles involve developing efficient physics simulations and
machine learning pipelines to train controllers to mimic human movement accurately.
He also pointed out the "sim-to-real gap," which complicates the transfer of controllers
learned in simulation to real robots due to differences between physics simulators and
real-world conditions.
Collaborating with Bence Ölveczky, a professor at the Department of Organismic and
Evolutionary Biology, and other colleagues from Harvard and Google's DeepMind,
Aldarondo led the development of a biologically accurate digital model of a rat.
Developing a Virtual Rat Model
The researchers collaborated with Google DeepMind due to its expertise in
training artificial neural networks (ANNs) capable of controlling biomechanical models of
animals within physics simulators.
They utilized MuJoCo, a physics simulator replicating gravity and other physical forces.
They devised a new pipeline called Motor Imitation and Control (MIMIC) to train the ANN
to mimic rat behaviour.
The researchers trained the ANN using detailed data obtained from real rats. Aldarondo
highlighted the significance of this advancement for neuroscience, as it facilitates the
development of computational models that simulate animal movement in physical
simulations.
This enables predictions about the neural activity patterns expected in real brains.
Employing the ANNs, the researchers constructed inverse dynamic models, believed to
be utilized by our brains for guiding bodily movements and transitioning from the present
body state to the intended state.
Aldarondo elaborated that, in simpler terms, an inverse model determines the muscle
activations necessary to attain a specific posture while considering the body's physics.
This framework proves valuable in motor neuroscience, as it entails learning how to
adapt to one's body's physical characteristics through interaction with the environment.
The information gathered from actual rats assisted the virtual model in understanding
the forces necessary to generate the intended movement for reaching a specific state,
even without direct training on them.
Upon measuring neural activity in both real rats and the virtual model, researchers
discovered that the virtual model precisely anticipated the neural activity observed in real
rats.
This marks the beginning of a new era in virtual neuroscience, wherein AI-simulated
animals could be used to investigate neural circuits and potentially explore how they are
affected by various diseases.
Researchers Develop Humanoid Robot Face Using Lab-Grown Human Skin Cells:
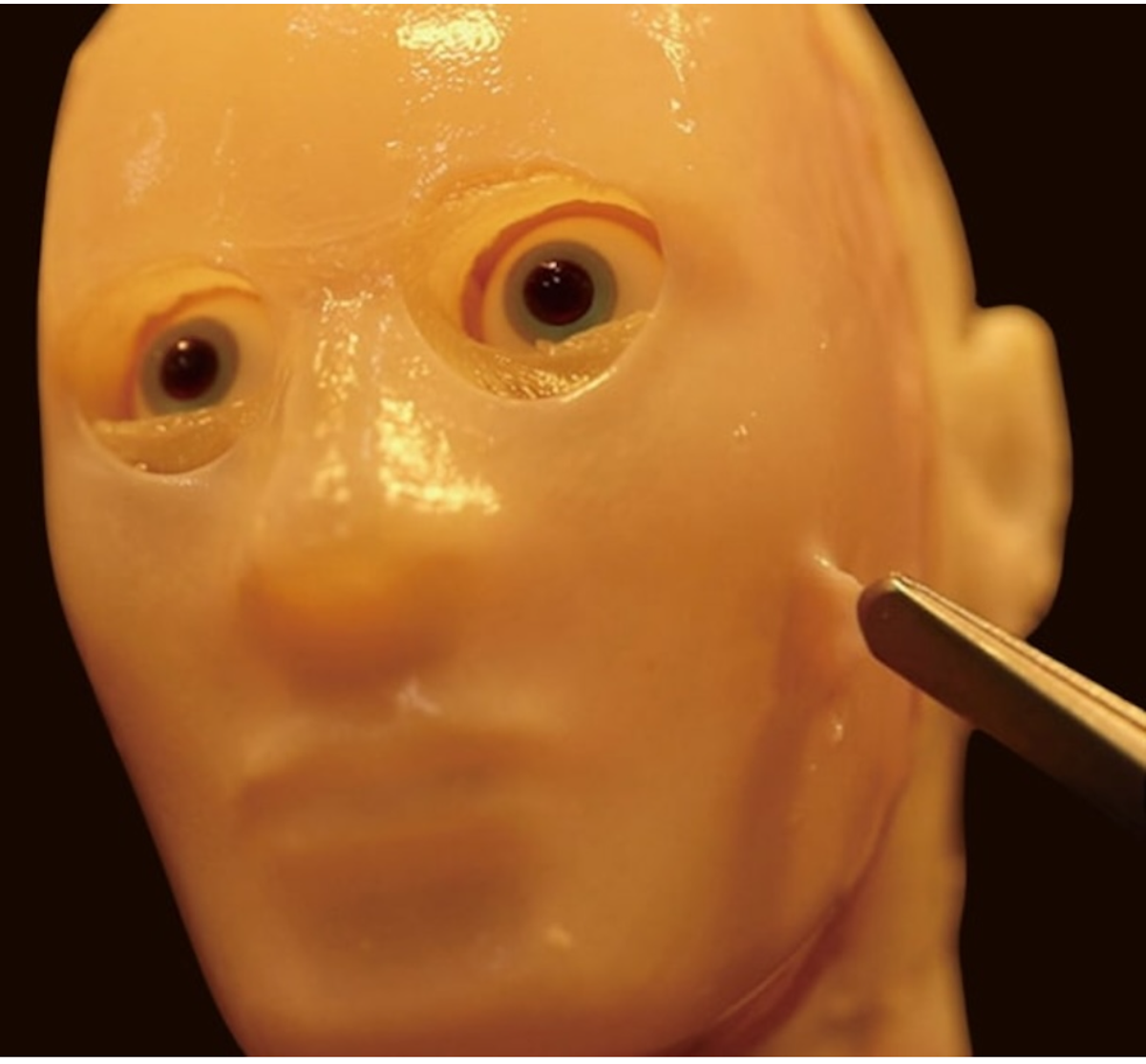
In a pioneering achievement, scientists at the University of Tokyo have unveiled a
humanoid robot face constructed entirely from lab-grown human skin. Published in Cell Reports Physical Science, the study marks a significant advancement with implications for various industries, including cosmetics and medical education.
The artificial skin, crafted using living cells in a laboratory setting, forms a 3D facial mould and a 2D skin layer for the robot. By replicating human skin's ligament structure, predominantly composed of collagen and elastin, the researchers ensured the skin could adhere seamlessly to complex robotic frameworks. This innovation allows for fluid facial expressions without compromising the skin's integrity.
Lead author Shoji Takeuchi emphasized the breakthrough's potential, highlighting the
natural flexibility and robust adhesion of the skin to mechanical components. This
capability ensures durability and lifelike movement, critical for applications ranging from plastic surgery training to soft robotics development.
Krishna Manaswi Digumarti from Queensland University of Technology praised the study
for its innovative approach to integrating soft and rigid materials, which could set new
standards in biomechanical engineering. Questions remain regarding the skin's longevity
and wear resistance, particularly under repetitive facial movements, a challenge
researchers aim to address in future studies.
Looking ahead, Takeuchi envisions enhancing the artificial skin with biological features
such as sweat glands, blood vessels, and nerves to achieve even greater realism and
functionality. This ambitious goal aligns with the field's trajectory toward biohybrid
robotics, where biological principles intersect with mechanical innovation.
The potential applications extend beyond robotics into areas like medical rehabilitation for
stroke patients, cosmetic augmentations for burn victims, and advancements in soft
robotics and animatronics. As research progresses, the integration of sophisticated
actuators and sensory mechanisms will be pivotal in replicating human-like expressions
and movements.
While the technology poses intriguing possibilities, ongoing research will determine its
practical viability and ethical considerations. As such, the future implications of lab-grown
human skin in robotics and healthcare promises to redefine our interaction with technology and our understanding of synthetic biology.